
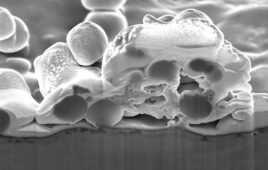
Twelve sensor cells at various angular positions are implemented on the surface of the fingertip. The complete analysis electronics system is soldered directly on the inside surface of the fingertip.
Editor’s Note: LaserMicronics, a service provider for laser-based manufacturing, has released the whitepaper “Robot hand with a sensitive touch: LDS tactile sensors for sensorimotor skills.” The paper describes a 2014 project from the CITEC department at Bielefeld University in Bielefeld, Germany, where researchers created a tactile sensor resembling a human fingertip. The sensor was then attached to an artificial hand.
Helpful humanoid robots—such as those in the movies—are inspiring a lot of research in a wide range of scientific disciplines. More than 200 scientists from engineering and life sciences collaborate within the interdisciplinary “CITEC” (Cognitive Interaction Technology) research cluster at Bielefeld University. At the start of 2014, a major step was taken with the development of a tactile sensor in the form of a fingertip for use in artificial hands, this key sensor limb is a complex laser distance sensor (LDS) component.
Unscrewing a bottle cap, turning on a light in the dark or grasping a glass tightly enough so it does not fall out of your hand does not present much of a challenge for many people. However, these actions all require complex sensorimotor skills as well as the ability to interpret sensory information (perceptions).
One of four core research fields in the CITEC Center of Excellence, motion intelligence has the aim of combining perception and action in robots to enable smooth human-robot collaboration, even in unforeseen environments.
To this end, cybernetics, biology and neuroinformatics experts have taken an integrated approach to derive the required skills from the underlying sensorimotor interactions between the robot and its environment. Four main aspects are involved in the research: intelligent motion, attentiveness (robot-human), situation-based communication and memory and learning processes. If robots are to be useful, they have to interact sensitively with the environment and use unknown objects safely in unstructured environments.
In 2007 the university created two highly flexible, human-sized robot hands with 20 degrees of freedom and 24 joints. The hands were installed on a seven-jointed industrial robot and represented a unique setup for research on bimanual grasping motions.
Read more on LaserMicronics’s whitepaper “Robot hand with a sensitive touch: LDS tactile sensors for sensorimotor skills.”
LaserMicronics
www.lasermicronics.de


Systems capable to behave so, that a foreign observer will believe that they are cognitive will be never designed, till researchers will thinking in terms of cognitive functions implementation into artificial systems.
Intelligence is not a property of a system, instead it is a kind of tag, which could be attributed to a system by an observer on a basis of subjective believes,which belong to that particular observer.
I could provide the general concept for designing of the super intelligent, subjective systems, which could work as professionals and did not require any further programming.
szeldichatgmaildotcom