Editor’s Note: This article is written by Manilka Abeysuriya and Richard Wheatley of Pera Technology Ltd; Juanma Belda of Instituto De Biomecanica De Valencia; Antonio Reddavid of Cultraro Automazione Engineering S.R.L.; and Pedro Fernandez and Leopoldo Fernandez of Especialidades Medico Ortopedicas.
More than 4.25 million people in the EU and approximately 10 million people in the U.S. are affected by Essential Tremor (ET) [1]. ET is a progressive neurological disorder of which the most recognizable feature is tremor of the arms [2]. ET is also the most prevalent tremor pathology and it affects the hand in 90% of the cases. Everyday tasks that require fine motor skills become difficult for sufferers, drastically reducing their quality of life.
Tremor Attenuation
Current solutions employed to combat ET, such as medication and surgery, are expensive and have side effects [3]. Moreover, these treatments are not effective in approximately 25% of patients and about 50% of pathological tremors cannot be adequately controlled with medication [4]. Various external mechanical solutions have been investigated, but have proven to be largely ineffective due to their physical size.
This article describes the development of a fluid dynamic design of a rotary damper for use in a low-profile and passive tremor attenuation orthosis. This project has received funding from the European Union’s Seventh Framework Program for research, technological development and demonstration under grant agreement No. 262127. ET-related movements fall in the frequency range between 4 and 8 Hz hence movements in this range should be targeted for suppression [2].
Design Considerations
The orthosis design consists of two struts, one strapped to the forearm and the other to the hand at the wrist. The two struts are joined together through the rotary damper at the wrist. Flexion of the hand results in rotation of the damper and damping occurs through fluid pressure and viscous friction.
The chosen configuration was originally developed by Cultraro Automazione Engineering S.R.L. for an automotive application. It consists of a paddle and a housing configuration with a small gap between them. The damping torque produced depends on the rate of strain and dynamic viscosity of the working fluid. Further, rate of strain also plays a major role in defining effective viscosity of the non-Newtonian fluid used in the damper.
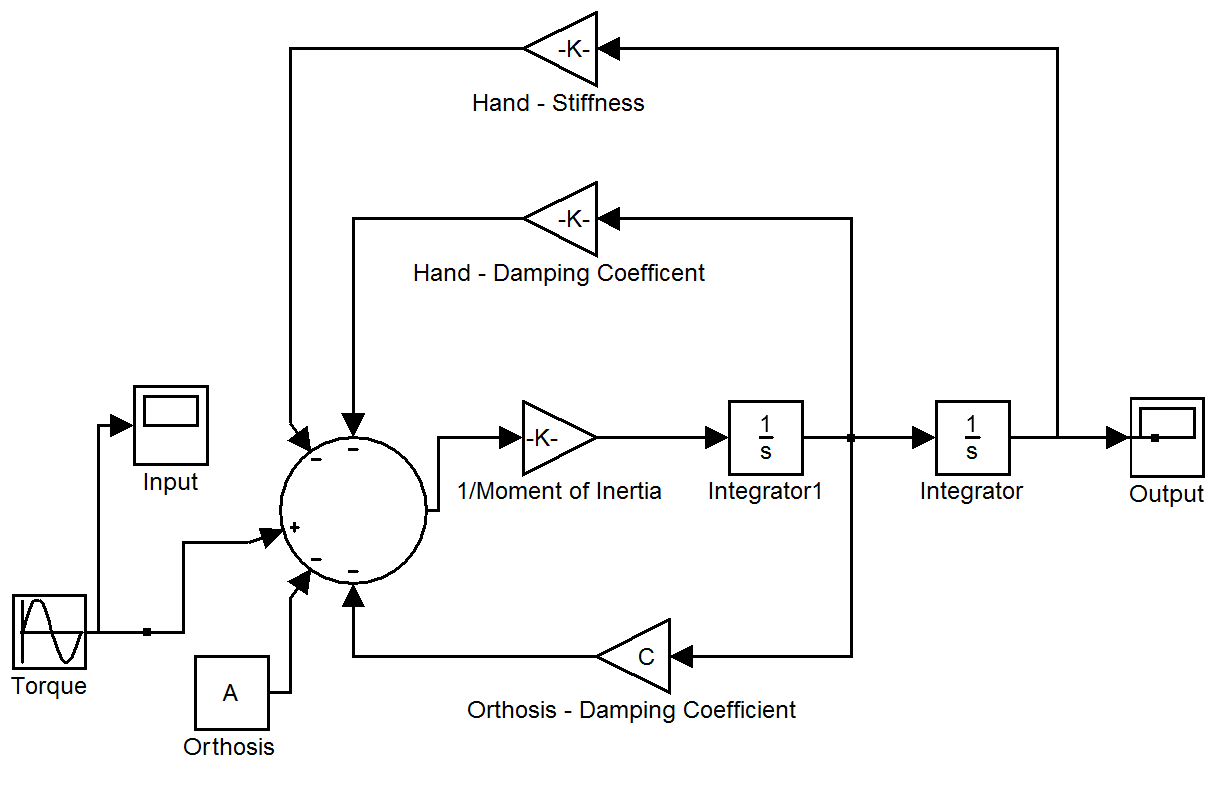
Figure 1: Tremor of the hand can be represented by simplifying the overall motion of the hand to a one degree of freedom, simple harmonic motion which is characterized by patient data.
Simulation Approach
Tremor of the hand can be represented by simplifying the overall motion of the hand to a one degree of freedom, simple harmonic motion which is characterized by patient data. A MATLAB/Simulink model was developed considering both the hand and the damping system (Figure 1).
The damping torque depends on the geometry of the damper, dry friction properties of the surface and materials, fluid viscosity-shear strain profile, temperature and frequency of operation. In a rotary damper, the shear rate varies with radial position and requires computational modeling or experimentation for a comprehensive analysis. An experimental approach is costly and time-consuming as it calls for building of multiple prototypes to arrive at a design with the target attenuation characteristics. In this case, STAR-CCM+ enabled a parametric design optimization of the system and was a much more time-cost effective alternative to any empirical method.
For accurate development of the STAR-CCM+ model, the implementation of the correct dynamic viscosity-strain rate profile was critical. Rheological tests were carried out to investigate this behavior of damper-working-fluid and the viscosity, and the resulting strain rate relationship was implemented in STAR-CCM+ as a user-defined function. The critical Reynolds number for a smooth-surface flow through a gap representative of that in the rotary damper design ranges from about 1500 to 2100 [5]. Considering the likely rotational speeds of the damper, the flow Reynolds number was estimated to fall below this critical range.
Discontinuous linear parts were implemented in the model to allow simultaneous contraction and expansion of the mesh to simulate the rotary motion of the damper.
The CFD results were then used in the MATLAB/Simulink system-level model to predict the reduction in amplitude of the tremor.
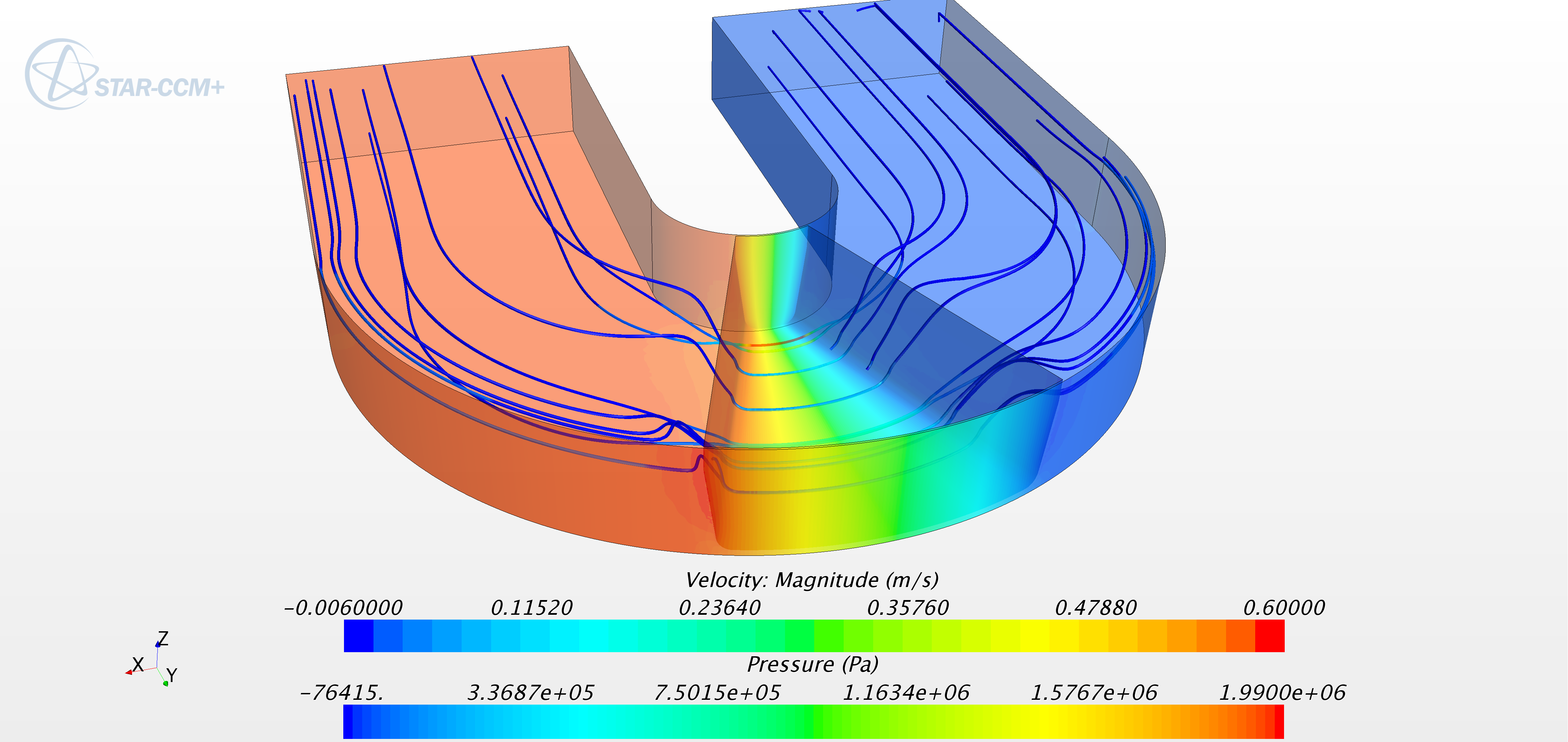
Figure 2: One of the initial designs had fluid gaps that were similar in size to the manufacturing tolerances, which meant that the damper performance for that design was highly sensitive to the tolerances of the components and the assembly technique.
Design Optimization
By using STAR-CCM+, various geometrical parameters were changed, without much effort, during the design exploration. One of the key considerations in this work was the tolerances that could be achieved with the manufacturing methods considered. The tolerance of the manufactured components and ultimately, the tolerance of the damper geometry after assembly, were of significant concern.
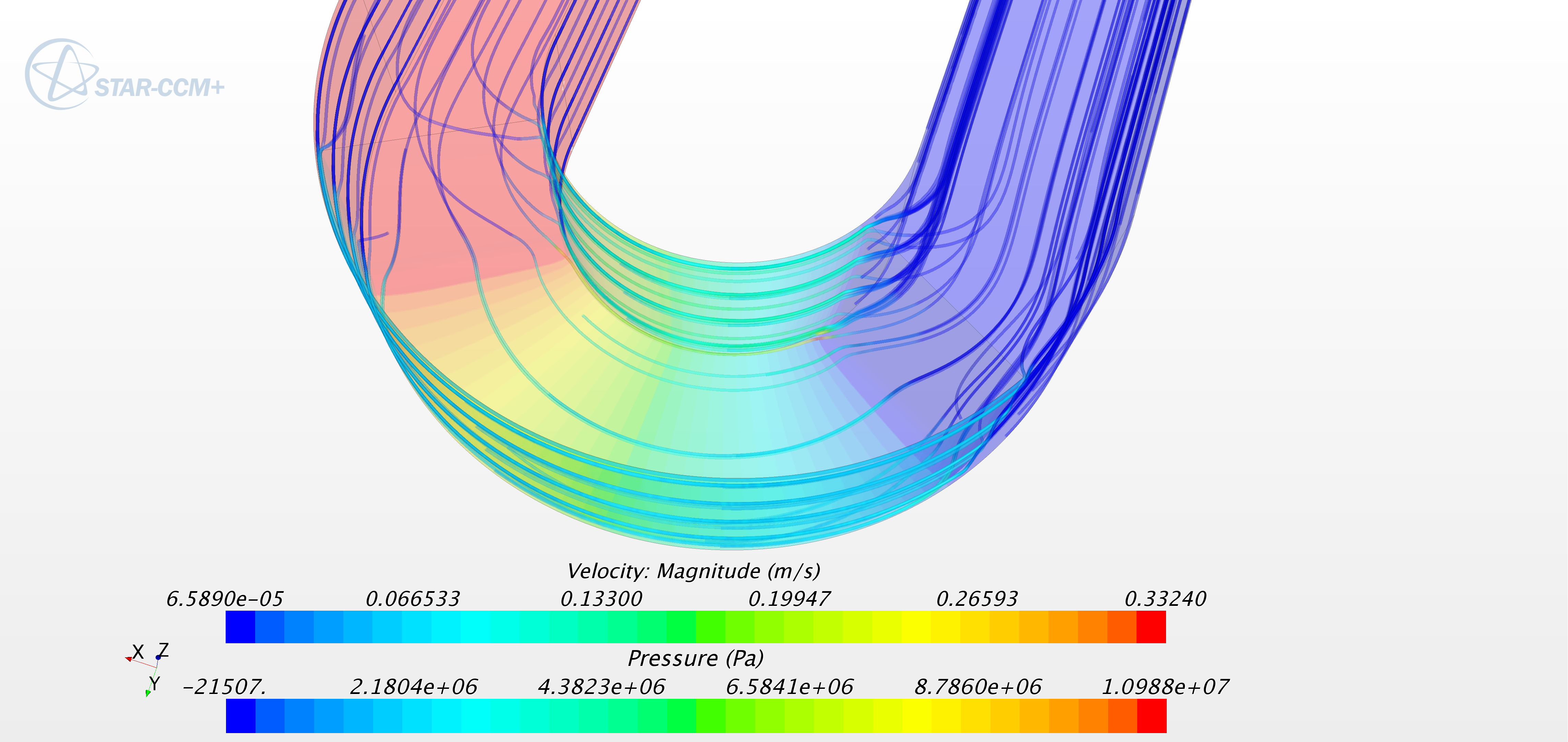
Figure 3: The larger surface area resulting from these changes increased the damping whilst reducing the sensitivity to manufacturing tolerances.
One of the initial designs (Figure 2) had fluid gaps that were similar in size to the manufacturing tolerances, which meant that the damper performance for that design was highly sensitive to the tolerances of the components and the assembly technique. To counter this, the azimuthal angle through which the paddle spans was increased and larger fluid gaps were introduced. The larger surface area resulting from these changes increased the damping whilst reducing the sensitivity to manufacturing tolerances (Figure 3).
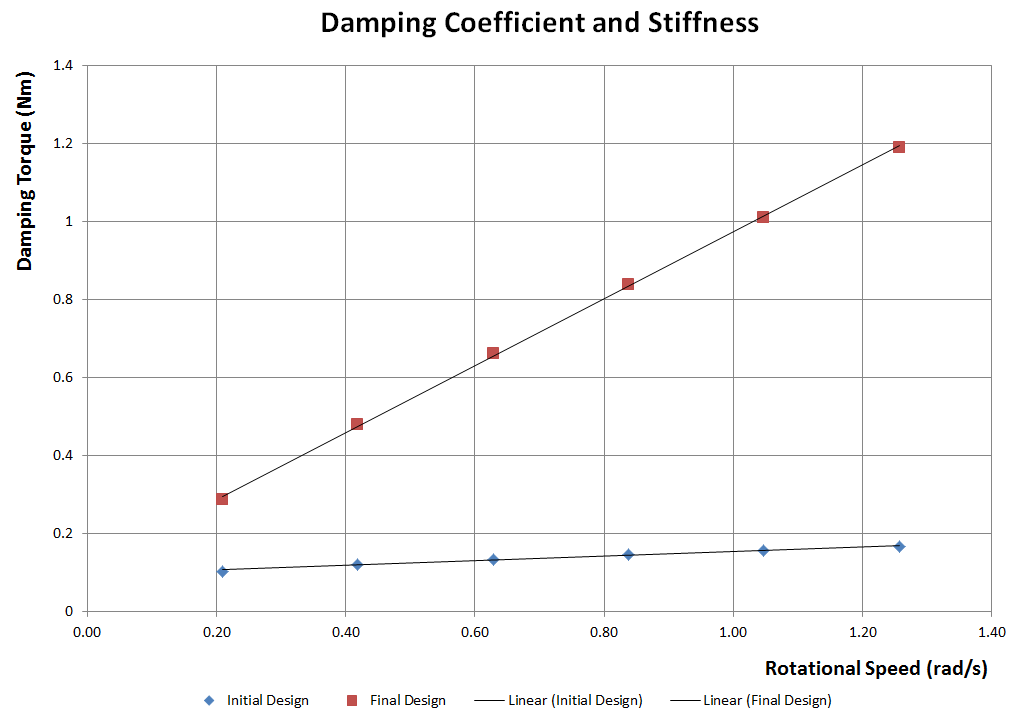
Figure 4 (Please click for enlargement.)
Performance
Figure 4 shows the output from STAR-CCM+ for the initial and the final damper designs. The results for the final design indicated a high damping coefficient and a slightly higher stiffness compared to the initial design. The tremor amplitude reduction is presented in Figure 5. The amplitude reduction with the final damper design was about eight to nine times higher than with the initial design. With the initial damper design, the reduction in amplitude seemed to increase with decreasing frequency contrary to the target characteristics. With the final damper design, the maximum amplitude reduction was around 2 Hz, and reducing with decreasing frequency below this level.
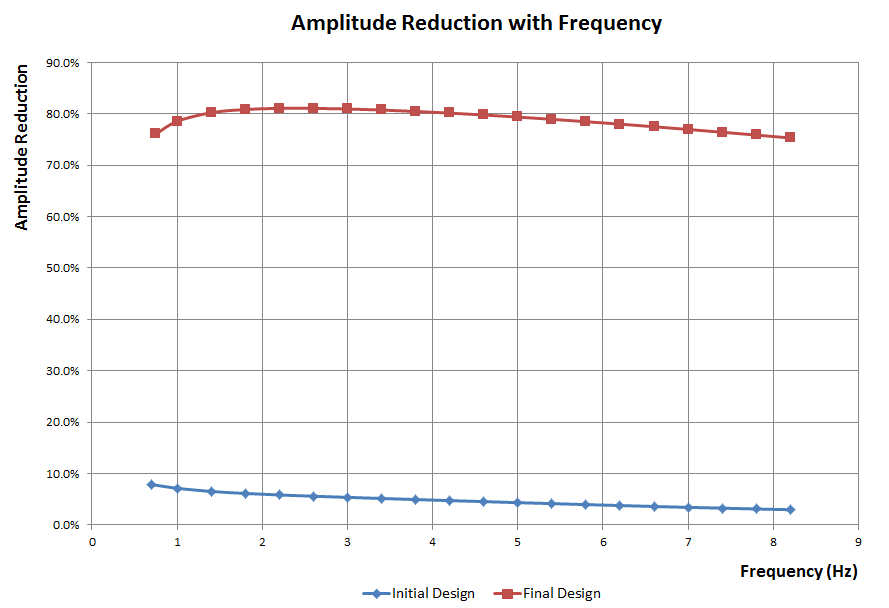
Figure 5 (Please click for enlargement.)
The orthosis
By employing the damper prototype based on the output of CFD simulations using STAR-CCM+, an orthosis was developed by Especialidades Médico Ortopédicas (Figure 6A and 6B). Prototype testing and patient trials carried out at Pera Technology UK and at the Instituto de Biomecánica de Valencia revealed about 30% reduction in tremor. The differences observed between the patient trials and the simulations were attributed to effects from human skin compliance.

Figure 6A: By employing the damper prototype based on the output of CFD simulations using STAR-CCM+, an orthosis was developed by Especialidades Médico Ortopédicas.
Clinical trials also revealed a significant improvement when the orthotic device was worn during activities such as writing. The development of a viscous fluid damper similar to that employed here normally takes over ten design iterations using physical prototypes. By employing a CFD simulation model to optimize the design, the final design was realized with the first prototype, significantly shortening the development time and drastically reducing the costs involved.

Figure 6B: Clinical trials also revealed a significant improvement when the orthotic device was worn during activities such as writing.
Conclusion
This article presents an example of how CFD simulations can be used as an effective means to fast-forward new product development by allowing progress through concept design, prototyping and clinical trials into the market in quick succession. In this case, a product developed for the automotive sector was employed as a starting point for a medical orthotic application. CFD was used in conjunction with a system-level model to simulate the final performance which in turn was mapped back to critical design factors. By employing design parameters in STAR-CCM+, design exploration and optimization was carried out to produce the prototype with the desired performance in the first design iteration.
References
1. S. Stephens: Essential Facts about Essential Tremor: This “quiet” disease, which affects 10 million Americans, is anything but benign. Neurology Now, 2011.
2. A. Anouti, W.C. Koller: Tremor disorders. Diagnosis and management. Western Journal of Medicine, June 1995; 162 (6).
3. R.L. Watts, W.C. Koller: Movement disorders: Neurologic principles and practice. McGraw-Hill Professional, 2004.
4. A. Prochazka, J. Elek, M. Javidan: Attenuation of pathological tremors by functional electrical stimulation I: Method. Annals of Biomedical Engineering, 1992; 20.
5. G. Hetsroni, A. Mosyak, E. Pogrebnyak, L.P. Yarin: Fluid fl ow in micro-channels. International journal of heat and mass transfer, 2005; 48.
Pera Technology Ltd.
www.peratechnology.com
Instituto De Biomecanica De Valencia
www.ibv.org/en/
Cultraro Automazione Engineering S.R.L.
www.cultraro.it
Especialidades Medico Ortopedicas
www.emo.es/en/
![A photo of the Medtronic GI Genius ColonPro polyp detection system flagging a potential sign of colon cancer during a colonoscopy. [Photo courtesy of Medtronic]](https://www.medicaldesignandoutsourcing.com/wp-content/uploads/2024/04/Medtronic-GI-Genius-doctors-268x170.jpg)


