MSC Adams simulation software helped researchers at Japan’s Kyusyu Sangyo University design robots that move like people, providing a new tool for testing medical technologies.

The robot has two degrees of freedom (DOFs) at each ankle, one DOF at each knee, and three DOFs per hip. Each actuator is driven by a 2-W dc motor.
One of the most prominent areas of focus in the robotics industry today is the design of more human-like robots. Giving human features to robots offers tremendous advantages compared to traditional designs. For example, some robots are now designed with human-like legs rather than wheels, which lets them move more easily in dangerous environments and over obstacles.
These bio-inspired robots also provide a testing ground for new medical technologies, such as the development of artificial muscles. This technology would give scientists insights into damaged limbs and help them develop new cures for patients to recover lost motor functions.
Researchers at Japan’s Kyusyu Sangyo University have been researching the benefits of designing robots with more human features. MSC Adams was their simulation tool of choice, and its Design of Experiments (DOE) capabilities were instrumental in helping them further refine their designs.
Challenge
Researchers at the University developed a two-legged human inspired robot called ADDAM (Android with Digital Dream for Advanced Machine). The robot has two degrees of freedom (DOFs) at each ankle, one DOF at each knee, and three DOFs per hip. Each actuator is driven by a 2-W dc motor. The robot stands 60-cm high and weighs 11 kg. The team has also developed a robotic arm driven by a micro electro-hydraulic actuator system.
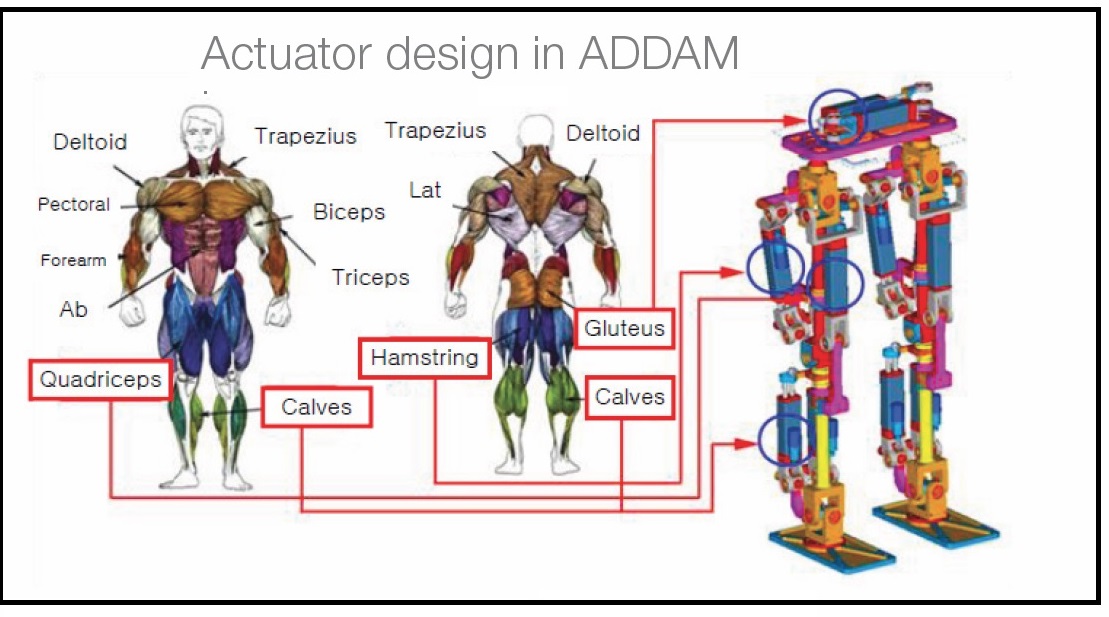
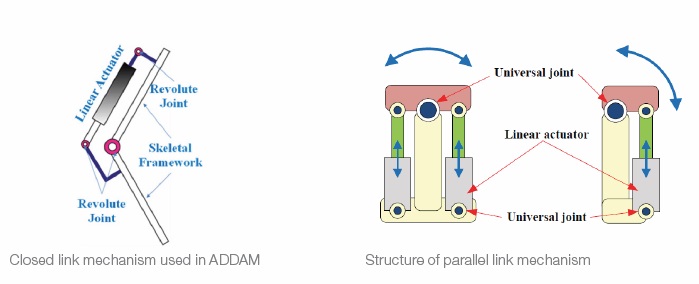
In the human body, muscles are attached to bones which are connected to joints. The developers of ADDAM borrowed this concept where each link is connected to each joint and not to the actuators. This model is a more accurate representation of the bending and walking function of the human knee. Several accompanying images shows the structure composed of two links connected by a revolute joint with a linear actuator positioned parallel to the links. This structure allows for a bending movement, similar to that of a human muscle. This approach makes it possible to achieve a relatively larger torque with a small motor.
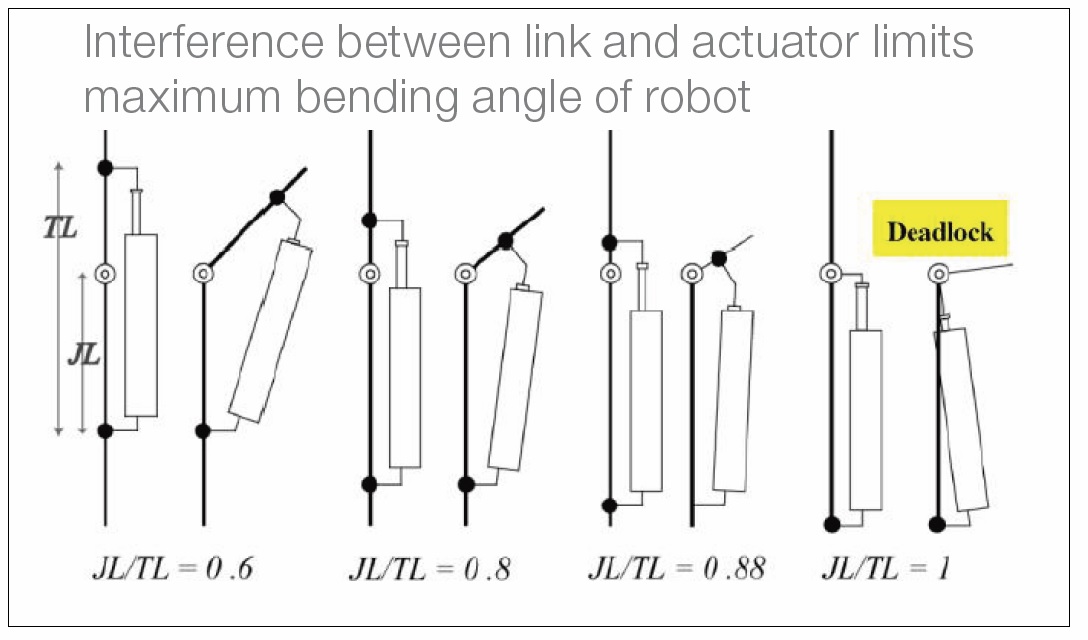
The human body moves in a variety of ways due to our intricate skeletal framework. The ADDAM’s bio-inspired design encompasses complex-motion profiles that make it difficult to design. Engineers had to ensure that the sizing of the links and actuators were accurate in order to achieve the needed working range that represents a human motion.
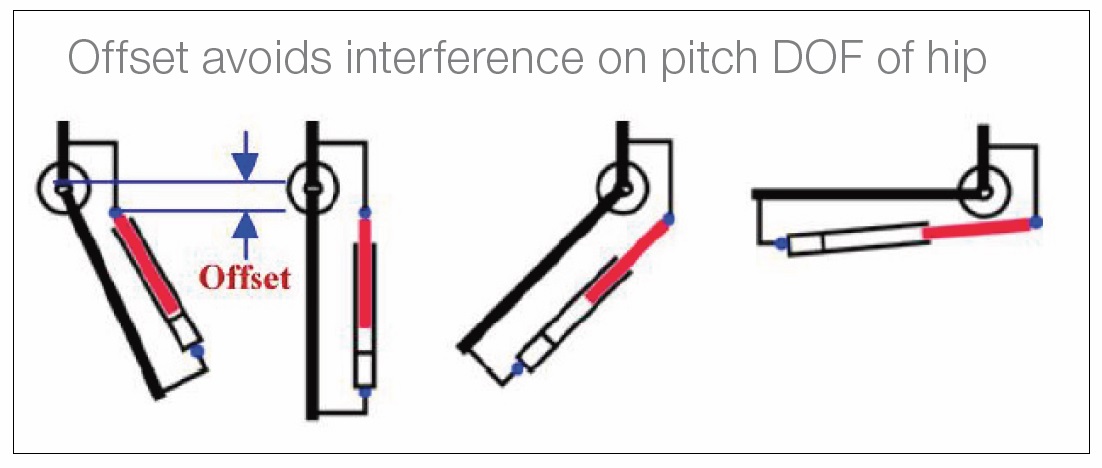
To provide a sufficient range of motion, the actuators are configured in an offset structure as shown in Offset avoids interference, above. Doing so, increases the complexity of the structure and number of design parameters that need to be optimized.
Solution and validation
Kyusyu Sangyo University researchers addressed these complex design challenges by simulating the design of the robot with MSC’s Adams multibody simulation software.
Researchers modeled the initial concept design of each of the robots in Adams and then used design-of-experiments to optimize each design parameter. The plot above (Angle of knee pitch joint) shows how the researchers used Adams simulation to set the length of the actuator Lk in the ADDAMS robot.
Using design-of-experiments feature, Adams was configured to iterate through Lk values from 70 to 210 mm, and calculate a maximum bending angle for each value. Results show that as Lk increases, maximum bending angle increases. However, at the maximum actuator length of 210 mm the bending angle is suddenly reduced because the actuator itself interferes with the motion. The plots show that an optimal value for Lk is about 170 mm.

The maximum bending angle as a function of actuator lengths (Lk, in the box) as predicted by Adams.
The final parametric design step involved simulating values around the approximate optimum values determined in the previous parametric simulation to find an optimum value with a higher degree of precision. As shown in the plots in Fine tuning of actuator length, dynamic simulation was performed with six values for Lk between 173 mm and 180 mm. The simulation showed that Lk = 177.5 provides a maximum bending angle of 70° which is sufficient for stable walking. The other design parameters on the robot were selected in the same way.
Multibody simulation was used to simulate the performance of the complete ADDAMS robot design to help predict different forms of inertia that it would typically face, such as:
- Linear inertia
- Rotary inertia
- Inclination
- Ground Reaction Force
 Simulation also predicted the zero moment point (ZMP), the point on the ground where the sum of all of the moments of active forces equals zero. ZMP is useful determining the robot’s stability, and was measured by physical experiments and the simulation predictions closely matched the physical measurements. Researchers found that the Adams simulation had a strong positive correlation to that of physical test results, indicating it would be able to handle treacherous terrain.
Simulation also predicted the zero moment point (ZMP), the point on the ground where the sum of all of the moments of active forces equals zero. ZMP is useful determining the robot’s stability, and was measured by physical experiments and the simulation predictions closely matched the physical measurements. Researchers found that the Adams simulation had a strong positive correlation to that of physical test results, indicating it would be able to handle treacherous terrain.
The results of the design of experiments and optimization study provided researchers with the information they needed to come up with a robust design that matches the physical testing.
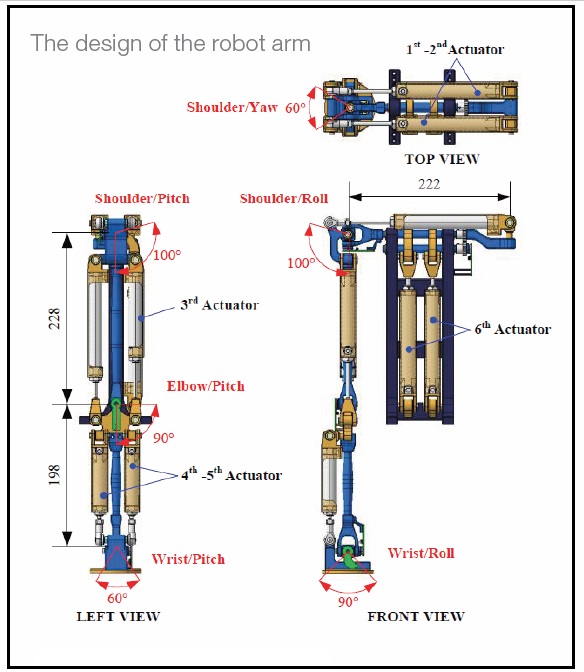
Physical experiments correlated so well with the simulation results for ADDAMS that Dr. Dr. Yong Kwun Lee’s team used MSC Adams to design a bio-inspired robotic arm. Team used the Adams software and design-of-experiments to optimize the link parameters in the design. After that, they confirmed its performance by simulating a rolling motion at the shoulder with the robot carrying a 2-kg mass. The physical experiments proved that their design can embody the motions made by a human arm.
Results
“Prototypes of the ADDAM robot and the robotic arm were built and performed as predicted by the simulation with a high degree of fidelity. The ADDAM robot demonstrated human-like walking capabilities and met all of our other design objectives. The robotic arm can lift an object greater than 5 kg even though its own mass is only 2.2 kg,” said Lee.
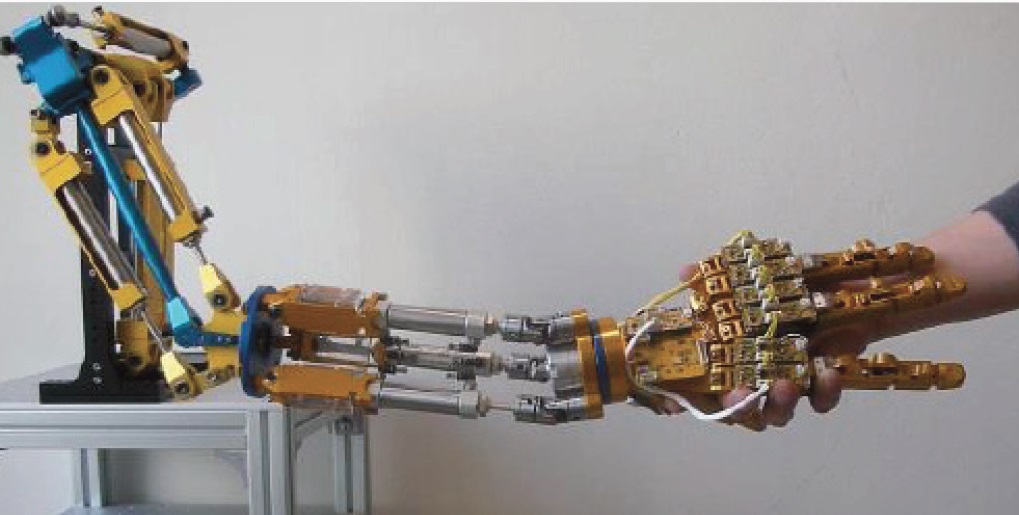
Pleased to meet you. A student at the Kyusyu Sangyo University greets the inspired robotic arm invented in the university’s biorobotic’s lab.
Researchers are planning to improve on the design of ADDAM by using multibody simulation to further improve its capabilities, such as by enabling it walk fast, run, jump, turn, and lift heavy weights.
[Want to stay more on top of MDO content? Subscribe to our weekly e-newsletter.]