Micromo, a division of Faulhaber
One advantage of dc motors is the linear relationship that allows for predictable operation. For instance under cold conditions, the torque constant KM is the approximate motor torque production per ampere of current (In metric units: mNm/A). This is also true under warm conditions, but the thermodynamic effects on the torque constant and motor performance are beyond the scope of this paper. So, plotting current versus torque for a brush or brushless motor demonstrates this directly proportional relationship. When the torque demand M increases, so does the current I. Without neglecting the friction torque MR the equation is divided by the torque constant as shown:
I = (M + MR) / KM)
Also, if we apply enough voltage across the terminals of a dc motor and the output shaft spins at a rate proportional to the applied voltage. We first calculate the back-EMF constant KE from the torque constant KM:
KE = KM * (2π / 60)
We then can subtract the product of the current I and terminal resistance R from the applied voltage Ua and multiply that quantity by 1,000 over the back-EMF constant KE to obtain the approximate speed n of the motor at the operating point (speed at torque) mathematically, like so:
n = (Ua – I * R) * (1,000 / KE)
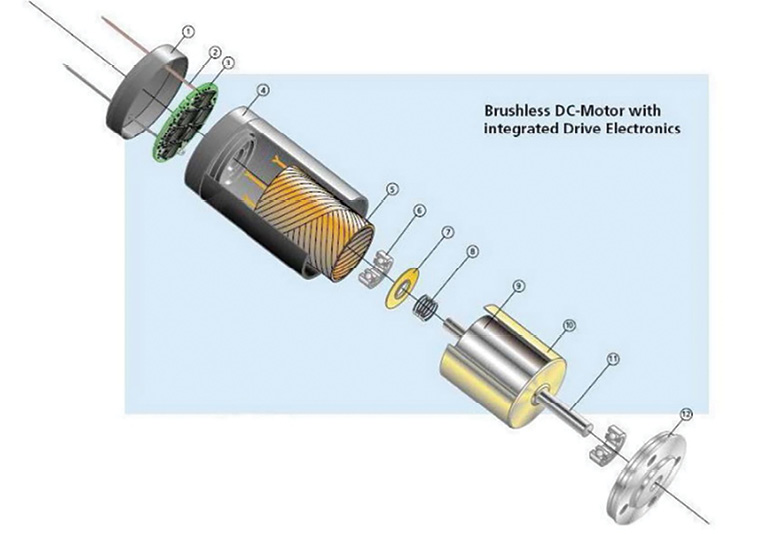
Despite this simple relationship, selecting a dc motor for an application can still be a daunting task. There are other variables to consider including dimensions, load, duty cycle, environment, and feedback considerations. When an application requires high speed, a quiet operation, low EMI, and longevity, consider brushless dc motors (BLDC). There are many advantages to brushless motor technology and speed is just one. Higher rotational velocity is possible with brushless because there are no mechanical limitations imposed by brush and commutator system. Brushless motors also eliminate unwanted current arcing, an issue that could lead to electro-erosion or micro-welding. Both are often observed when precious metal brush motors are overdriven beyond their rated specifications. BLDC motors often possess higher efficiency, and normally generate less electromagnetic interference or EMI. This can be beneficial for EMI sensitive applications. Because the stator is constituted by the motor coil, the superior thermal characteristics of BLDC over brush motors make it a great choice for applications that demand high torque. With the stator in close proximity to the case, heat dissipation is more efficient (especially with a heat sink). As a result, little maintenance is required on a brushless motor.
On the downside, BLDCs often cost more than the DC brush variety. It is possible to spend twice as much on a brushless system while at the same time sacrificing the simplicity of a brush commutated motor.
In addition, control and drive electronics are required to properly commutate and drive BLDC motors. One may have to reserve additional space in their application for controls and drive electronics. This is only true when the drive electronics are not integrated into the motor, but it often is the case.
Whether you implement brush or brushless, another item that must be taken into consideration is the length of the motors’ leads that supply power and feedback. Long cable runs tend to introduce EMI into the system, so one may have to compensate by implementing shielded-twisted pair to bleed off noise.
As previously mentioned, motors must overcome starting friction MR as well. This term includes both static and dynamic friction. Static friction C0 is the sum of torque losses not dependent on speed. For a coreless brush motor, that friction is simply:
MR = C0
But for brushless motors, that term must include the dynamic friction term CV multiplied by the speed n:
MR = C0 + nCV
Dynamic friction is different from its static counterpart. It is essentially zero on coreless brush motors, but becomes a factor for brushless motors at high speed. Dynamic friction (In metric units: mNm/rpm), which is sometimes referred to as the viscous dampening term, is the only factor defining torque losses in proportion with speed. The term includes losses due to the viscous friction of the ball bearings, as well as eddy currents induced by the changing magnetic field in accordance with Faraday’s law of induction.
Overall, expect the speed-torque curve to demonstrate excellent linearity for both brush and BLDC technology. Choosing the right motor for an application can make the difference between a successful development effort and a headache. Consider both cost and performance before making a selection. These are always application dependent for all motion control projects.


