Terry Persun, contributing editor
Accuracy and speed are required for delicate drug and pharmaceutical experiments.
One challenge of early stage drug discovery is the accurate identification of compounds that can yield effective drugs. Researchers frequently use a variety of automated methods to quickly and efficiently identify candidate molecules. Hudson Robotics’ liquid handling instruments often assist in the search. The devices transfer liquids from various sources to standard SBS-footprint (Society for Biomolecular Screening) microplates, as well as non-standard labware.
The SBS microplate plays a critical role in the search by allowing quick measurements of high volume of compounds for biochemical or immunological activity. Microplates commonly used in biomolecular screening will have 96, 384, or 1,536-wells in which a tiny amount of a compound to be tested is combined with a reagent. An effect on the reagent provides a measure of the compound’s potential value and effectiveness against a particular biological system or disease.

The AllMotion EZHR17EN controller bolts to the motor it controls and lets the SOLO robotic pipettor push its performance boundaries.
Hudson Robotics’ engineering team selected the AllMotion EZHR17EN controller for their introduction of their SOLO high-throughput robotic pipettor to maintain the accuracies they needed for superior operation. The controller allows fast, user-friendly implementation of stepper motors for all types of automation products and systems like the SOLO. The stepper-motor controller and driver bolts easily onto the back of the motor it controls. At only 1.6 x 1.6-inch (40 x 40 mm), the controller uses a single, four-wire bus (two power and two communications wires) and can link up to 16 stepper motor controllers in a daisy-chain format.
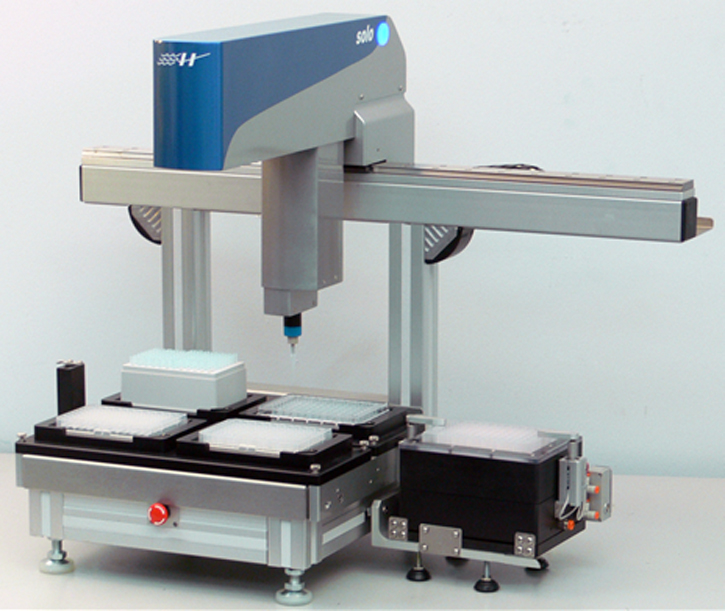
The Hudson Robotics SOLO handlers deliver volumes with low coefficients of variation (CV), an indicator of repeatability, and can be safely used with live cell cultures.
When Hudson Robotics designed the SOLO high-throughput robotic pipettor, they wanted it to have a low cost, but also feature high volumetric accuracies, down to a microliter. Further, they wanted users to handle reactions in a sterile environment, load and operate manually, and be compatible with robotic systems that load microplates, including the company’s PlateCrane EX.
The SOLO Liquid Handler is now equipped with AllMotion’s EZHR17EN controller for its pipettor operation.
As an automated, air-displacement pipettor, the SOLO is available in single, eight, and 12-channel options. The device can be programmed to do anything expected of a hand-held pipettor, but with greatly improved precision. Operation is facilitated by simply setting up the pipetting steps in the company’s intuitive SOLOSoft control software, then transferring that information by either downloading it to the EZHR17EN controller’s on-board EEPROM for stand-alone operation (no PC connection), or through a communications port, such as RS232, RS485, or a USB-based communications network.
The SOLO was originally developed to meet growing needs throughout the research, pharmaceutical, and clinical communities for a high resolution and compact robotic pipettor. It provides researchers with “walk-away freedom”, a small footprint, and easy to use software, which is closely linked to the Hudson Robotics’ SoftLinx program, a powerful multitasking, dynamic tracking and scheduling software package for planning and running automated laboratory workcells.

The PlateCrane EX is a new-generation cylindrical robot arm optimized for handling labware in the “SBS footprint”, including microplates, reservoirs, and disposable tip racks. The robot loads and unloads microplate-based lab instruments, such as readers, washers, and reagent dispensers.
The SOLO air-displacement pipettor is equipped with a single stepper motor driving the pipettor operation. The controller operates from 12 to 40V and offers up to 20 million microsteps/sec for tight control of the pipettor operation. The controller accurately governs the speed of the fill and dispense operations. The speed of operation is controlled based on the fluid used, as well as tip size, and whether or not the tip had a filter installed. In research work, the fluid could be based on water, ethanol, or glycerol. The controller allows handling from 10 to 200 microliters/sec with programmable ramps and speeds.
The robotic pipettor interacts with one experiment at a time, requiring a single channel, even though a multi-tip is available with either an 8-tip pipette head or 12-tip pipette head. The robotic pipettor is standard with a six-position deck. This lets users transfer samples quickly from plate to plate or to do a serial dilution across the plate. What’s more, the robotic pipettor easily adapts without tools to either head. The 12-tip head finishes plate-to-plate transfers 50% faster than the 8-tip head, or switch to the 8-position head for easy serial dilutions.
Users who wish to cherry-pick from individual wells can use either the single-tip SOLO robotic pipettor or the multi-tip configuration. The robotic pipettor multi-tip (both 8-channel and 12-channel) can work with just one tip, several tips, or all the tips without issues. There is no need to switch to a single tip pipette head.
The mechanical drive and software controls of the pipette head let the SOLO robotic pipettor push the boundaries of pipetting performance. With CVs of less than 3% across the entire pipetting range, users trim time by using a single pipette head for both multi-tip and single-tip operations. Small volume pipette heads are available for working between 0.5 and 20 microliters.



