Removing tumors from within the inner ear is a very delicate matter that typically requires surgeons to remove the entire mastoid bone. However, in the future, all doctors will need to do is cut a tunnel of 5 mm in diameter through the bone using a miniature robot named NiLiBoRo. The system is capable of adjusting its path while drilling through bone to steer around sensitive tissue such as blood vessels and nerves. Researchers will be displaying the new technology at the Compamed exhibition from November 16-19 in Düsseldorf (Hall 08a, Booth K38).
Surgery is unavoidable for treating inner ear tumors, but the inner ear is difficult to access. This is because it is covered by a cranial bone known as the mastoid, or petrosal bone. What’s more, the surrounding tissue contains lots of nerves and blood vessels. For this reason the surgeons will cut out as much of the mastoid bone as needed until they have located each one of these sensitive structures. Only then can they be sure not to damage them. What this entails most of the time is the removal of the entire bone. The hole thus created is filled in with fatty tissue taken from the abdomen after the completion of the procedure.
Performing Surgery Through a 5mm Wide Tunnel
In the future this operation will be performed in a less invasive fashion, requiring just a small hole measuring 5 mm in diameter through which the tumor can be resected from the inner ear. The technology that makes this possible goes by the name of NiLiBoRo, a German acronym which stands for “Non-linear Drilling Robot”. The system is being developed by researchers in the Mannheim Project Group for Automation in Medicine and Biotechnology, part of the Fraunhofer Institute for Production Technology and Automation IPA, in cooperation with the Technical University of Darmstadt, the University of Aachen, and the Düsseldorf University Clinic. Drilling machines capable of boring a tunnel through bone already exist, but they can do so only in a straight line. “NiLiBoRo is the first one that can drill around corners as well,” says project group scientist Lennart Karstensen. It is this particular characteristic that makes it possible to perform minimally invasive surgery on inner ear tumors. If the tunnel were to run in a straight line, it would at times come troublingly close to hitting nerves. To avoid injuring nerve tissue, the tunnel would have to be no more than 1 to 2 mm in diameter. However, it is impossible to perform surgery through such a small opening. The NiLiBoRo on the other hand is capable of steering around sensitive areas. This makes it possible to achieve a tunnel diameter of 5 m, which is wide enough to perform the operation.
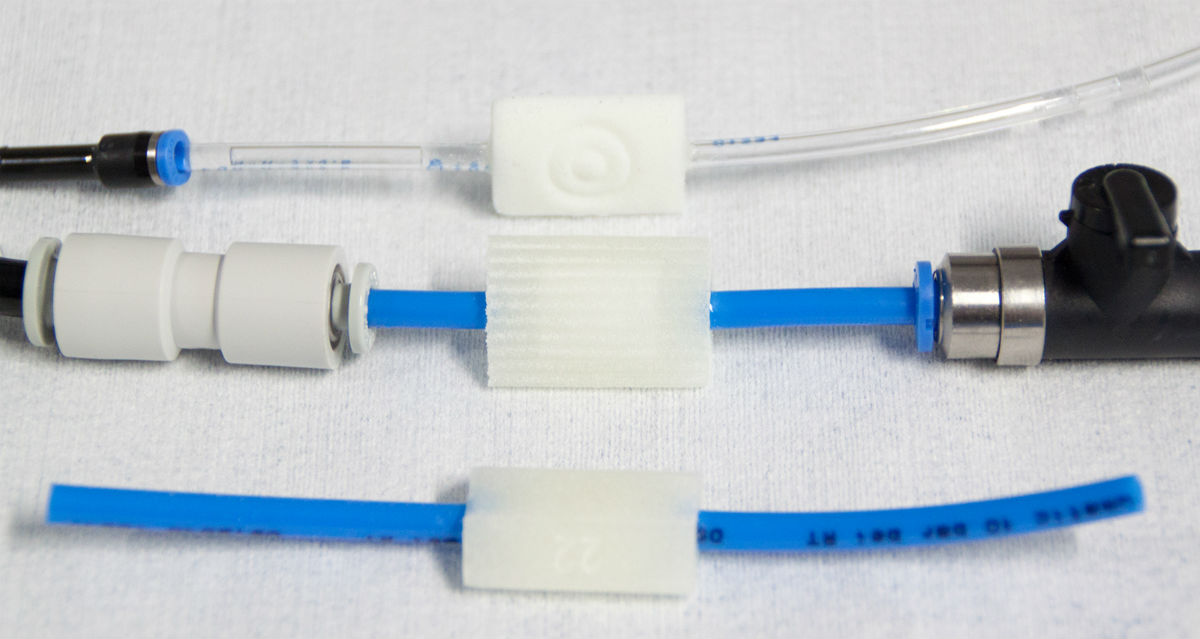
NiLiBoRo is held in place during surgery using its expandable bladders. Researchers are currently optimizing the pocket geometry using multiple prototypes. (Credit: Fraunhofer IPA)
Hydraulic Lines Allow the Robot Worm to Crawl Forward
So how does this “worm” manage to drill around curves and corners through the mastoid bone? “The worm consists of a ‘head’ and a ‘tail’ section,” explains Karstensen. “Both of these parts are connected with one another by means of a flexible bellows mechanism.” The design is reminiscent of an articulated public transit bus in which the front and rear sections are coupled by means of a hose-like center section that looks like an accordion.
As it travels through the bone, the robot is connected to the “outside world” – in other words the control units and pumps in the operation room – by means of 8 to 12 hydraulic lines. It is these lines that allow the robot to crawl forward in the right direction. This is done by first pumping hydraulic fluid into three bladders found in the rear section of the robot. The bladders fill in the empty space between the worm and the bone and thereby fix the rear section of the robot in place. The hydraulic fluid then travels into the bellows. This causes the “accordion” to expand, which pushes the head forward. The worm stretches, so to speak, and presses its front section further into the bone. The drill attached to the head bores deeper inward. Now the rear section retracts towards the head in a motion similar to that of a real worm. To do so, the bladders in the front section are pumped full of fluid to hold the front in place while the fluid in the rear bladders is evacuated. At this point the fluid is also being sucked out of the bellows through the hydraulic lines. The robot contracts, which pulls the rear section up behind the front. In this way the NiLiBoRo makes its way forward bit by bit. “We can alter the robot’s direction of travel by adjusting the bladders in the front section. For instance, if we wanted to move left then we fill the left bladder with less fluid than the right, which will cause the robot to veer to the left,” says Karstensen.
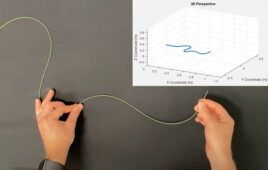
In the laboratory, and later in the operation room, the path the NiLiBoRo takes as it drills its way forward is precisely monitored by an electromagnetic tracking system, or EMT for short. Designed by partners at the Technical University of Darmstadt, this system works by sporadically capturing images of the robot using computer tomography in order to monitor its position.
Researchers have already constructed an initial prototype of the NiLiBoRo, which is currently five times larger than the planned final version. Right now it is composed of only the forward section together with the heart of the machine, the bellows. The developers plan to continue optimizing and expanding the prototype piece by piece. Once all the technology has been developed, the NiLiBoRo will be shrunk down to its final size. Researchers hope to have the miniature robot ready for testing by physicians in two years.