By Chris Grujon, TenAsys Corp. Beaverton, Ore.
Real-time operating system software helps provide tactile sense to medical robotics applications
No matter how many motion axes are involved and regardless of whether the movement is fast or slow, high-end robotics applications share the need for determinism. The system that controls the robot needs to keep precise track of the machine at all times, while providing accurate feedback to the machine operator. This is particularly true in the hospital operating room, where robots are now beginning to handle complex life-critical motion functions such as catheter insertion.
This is an example of a two-handed haptic interface, used for general surgery applications. Courtesy Force Dimension.
Visual feedback on a monitor screen is sometimes not enough to guide medical robotic systems reliably. A special attribute of some of the new surgical robotics is that they also provide tactile feedback to surgeons to help orchestrate the motion. For example, consider the Sensei® Robotic Catheter System supplied by Hansen Medical of Mountain View, Calif. The Sensei system uses a haptic device to precisely control the tip of the catheter.
Haptic devices are input-output devices that track a user’s physical manipulations and provide realistic touch sensations. This helps guide the user as he/she operates the robotic motion system. With the sensory feedback that haptics provide, you have the ability to touch, feel and manipulate three-dimensional objects, or “feel” your way through three-dimensional spaces and prevent motion into areas where it could cause harm—making it suitable for robotic surgery applications.
It takes a combination of advanced technologies to provide a realistic experience to the human operator. Specifically, three technologies are involved in haptics: the mechanical arrangement of hand actuator and motors, the electronics that interface to the motors and the software that responds to feedback and drives the system. The control system must update the positions of the dc motors that provide the feedback to the operator 1,000 times per second. If the motor positions were updated more slowly, the user might feel slight vibrations that were not intended by the control system. The haptic devices produced by one vendor, Force Dimension of Nyon, Switzerland, use the same type of dc motors that NASA’s Mars rovers use. They produce motion that is perfectly smooth—with as little inertia as possible.
The application software that works with the haptic device tracks the position of the end effector and computes the force that must be transmitted back to the user, completing all calculations once every millisecond. Depending on the application, the haptic device can prevent motion into dangerous areas, or it can simulate features by vibrating slightly, providing the illusion of texture.

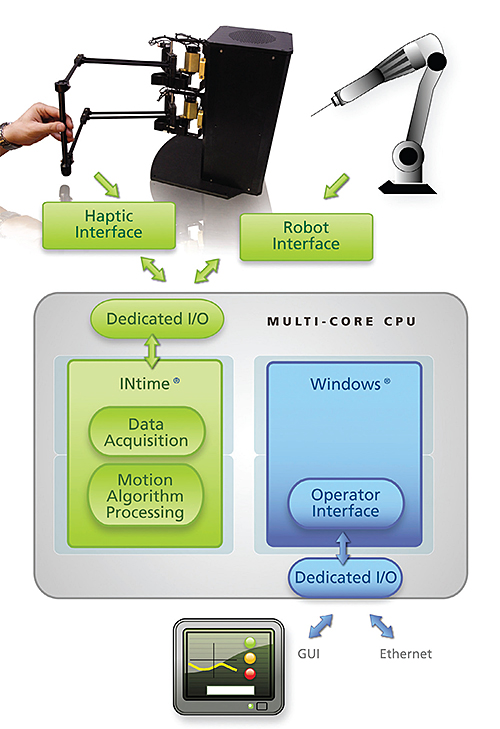
In this medical robotics system, the real-time and human-directed portions of the application are hosted on different operating systems on the same computing platform. Here, a Quanser haptic device emulates a scalpel.
Advanced processing can discriminate between forces that should be filtered out and those that should be passed through to the operator through the haptic interface. For example, a catheter placement system uses advanced processing that can ignore some frictional drag forces on the robot’s end effector that don’t affect the insertion process.
Software ensures determinism
To ensure that the system is able to update the haptic interface reliably each millisecond, it needs to use a real-time operating system (RTOS) to manage the software that closes the motor control loops. Without the RTOS, the position updates couldn’t be done predictably in the time allotted. For example, if the Windows OS were controlling the haptic motor position updates and Windows were to hand control to a non-critical task when an update was due, there could be a glitch in the motion.
Force Dimension offers a software development kit that supports different computer platforms. One of those systems is the INtime for Windows RTOS from TenAsys Corp., which runs alongside Microsoft Windows.
With INtime, application developers can use standard Windows tools, the same ones that are used to develop the machine’s graphical user interface and other general-purpose functionality, along with Force Dimension’s haptic interface software library, to build their robotic control systems.
Simulations help development
Other companies are doing advanced research and development from an academic perspective. For example, Quanser Inc. of Markham, Ont. provides engineering equipment for labs that teach mechatronics as well as advanced platforms for robotics research by OEMs. To develop the new generation of robotic surgery tools, Quanser interacts with 3D virtual models of the human body, down to its organs, glands and tissue cells. The ability to simulate robotics applications while the design is still at the graphical, conceptual level saves design time and promotes safety of operation by allowing unstable conditions to be factored out of a design before the robot is actually built. Once motion software that interfaces with the graphical model is perfected, it can be quickly converted to actual software code to drive the robot.
Among Quanser’s offerings is a control software package called QUARC, a design tool that may be used to rapidly convert a mathematical model of a robotic control system, implemented with Simulink by The MathWorks, to a real-time executable control program. To support real-time execution of haptic applications with absolute determinism, Quanser’s QUARC control environment also relies on TenAsys’ INtime for Windows real-time OS at its core.
Combining Windows and real-time control
INtime allows the partitioning of application software of different types, both deterministic and non-deterministic on the same computing platform. The software does this by leveraging the hardware support that is built into Intel processors to isolate Windows tasks such that they cannot affect the system’s response to real-time events. Unlike some software that attempts to add real-time function as a device driver to Windows (often an unreliable process), INtime is a separate software environment, with its own task scheduler thsat ensures that the processing of time critical tasks is predictably accurate.
Many different types of haptic devices are available. This one, the Omega 3 model from Force Dimension, can be moved in six different axes by a human operator (x, y, z, plus pitch, yaw, roll).
In the haptic-controlled robotic system, INtime takes control of the response-time-critical I/O devices in the system, while allowing Windows to control the I/O that is not real-time critical. By enabling both real-time and Windows applications to run on the same platform, INtime saves system cost and complexity compared to robotic systems that use multiple separate computing platforms, networked together, in order to ensure that the human interface processing doesn’t affect the deterministic processing of real-time events.
When the system’s real-time environment needs to pass information to the Windows environment, it does so via protected shared-memory locations, and users of multi-core processor platforms can get a performance boost by configuring the software to run the real-time processes on their own cores, separate from core(s) running Windows.
Haptic technology promises to revolutionize many fields involving precise motion control, not just medical electronics. The key is to control the system with a reliable RTOS that can meet the performance goals of the application while also playing well with the system’s other human-directed software.
Discuss this on The Engineering Exchange:

TenAsys Corp.
www.tenasys.com



