Like their natural role models, the BionicANTs work together under clear rules. They communicate with each other and coordinate both their actions and movements. Each ant makes its decisions autonomously, but in doing so is always subordinate to the common objective and thereby plays its part towards solving the task in hand.
Editor’s Note: Festo, an industrial control and automation company, has released the whitepaper “BionicANTs: Cooperative behavior based on a natural model.” The paper describes the BionicANT, a creation of Festo engineers that duplicates the physical anatomy of its natural counterpart and reproduces the insect’s cooperative behavior.
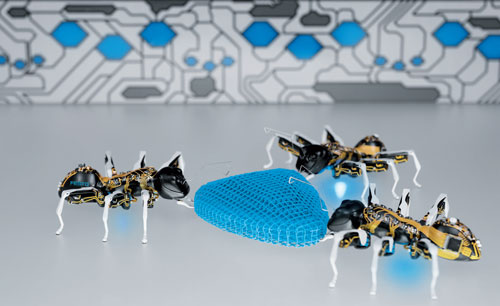
Festo engineers have used the delicate anatomy of an ant as a role model to build BionicANTs. For the first time, the cooperative behavior of the creatures has also been transferred to the world of technology using complex control algorithms.
Like their natural role models, the BionicANTs work together under clear rules. They communicate with each other and coordinate both their actions and movements. Each ant makes its decisions autonomously, but in doing so is always subordinate to the common objective and thereby plays its part towards solving the task in hand.
In an abstract manner, this cooperative behavior provides interesting approaches for the factory of tomorrow. Future production systems will be founded on intelligent components, which adjust themselves to different production scenarios and thus take on tasks from a higher control level.
The BionicANTs demonstrate how individual units can react independently to different situations, coordinate with each other and act as an overall networked system. For instance, by pushing and pulling together, the artificial ants move an object across a defined area. This intelligent division of work, lets the team transport loads that a single ant could not move.
Read more on Festo’s whitepaper, “BionicANTs: Cooperative behavior based on a natural model.”
Festo
www.festo.com


![A photo of the Medtronic GI Genius ColonPro polyp detection system flagging a potential sign of colon cancer during a colonoscopy. [Photo courtesy of Medtronic]](https://www.medicaldesignandoutsourcing.com/wp-content/uploads/2024/04/Medtronic-GI-Genius-doctors-268x170.jpg)