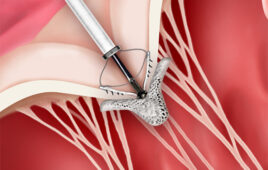
A new biohybrid micro-robot is developed by capturing bovine sperm cells inside ferromagnetic microtubes that use the motile cells as driving force. These micro-bio-robots can be remotely controlled by an external magnetic field. The performance of micro-robots is described in dependence on tube radius, cell penetration and temperature. The combination of a biological power source and a microdevice is a compelling approach to the development of new microrobotic devices with fascinating future applications such as in-vivo artificial fertilization.